로보컵 2006은 6월14일부터 18일까지 월드컵에 맞추어 독일 브레멘에서 열린 행사로 1997년 일본을 중심으로 처음 열린 뒤 올해 10회째를 맞는 대회다. 이번 대회에는 총 36개국 350개팀(참가자 1000명이상)이 참가하여 10개 종목에 나뉘어 경기를 펼쳤다.
한국 로봇팀 '로스큐'(Roscue:Robot for Rescue)는 한국과학기술연구원(KIST, 원장 금동화) 지능로봇연구센터 강성철 박사팀이 주관하여 로봇 시스템 설계 및 통합을 담당하고, 성균관대 지능시스템센터(이석한 교수)에서 자율주행 기능, (주)유진로봇에서 로봇 기구부 제작을 담당해 참가했다.
로보컵 구조로봇 부문에는 일본, 미국, 유럽, 아시아 등에서 9개국 23개팀이 참가하여 경쟁을 펼쳤다. 로보컵 구조로봇 부문 정규리그, 험지주행(locomotion challenge)리그, 자율로봇(autonomous challenge)리그 세가지 종목 중 험지주행(locomotion challenge)리그에서 일본, 이란에 이어 3위를 차지했다.
구조로봇부문 경기는 지진이 일어난 건물 내의 상황을 모의로 꾸며 놓고 여기에 로봇을 투입하여 계단 등과 같은 불규칙한 지면을 이동하며 재난현장의 지도를 로봇이 작성하고, 그 지도상에 모의 희생자 위치와 신체상태(체온, 호흡, 움직임, 소리 등)를 탐색하게 된다.
5일동안 총 7회의 경기를 리그전으로 펼쳐 최고 득점자가 우승하는 방식이다. 경기 시간은 예선은 10분, 본선은 20분이다.
구조로봇 부문 경기는 미국 국립표준기술원(NIST)과 일본 국제재난구조시스템센터가 주축이 되어, 지진 등의 재난현장에 투입되어 인명을 구조하는 로봇 기술을 발전시키고 재난 구조로봇 성능평가 시스템을 표준화하기 위한 목적으로 2001년부터 국제대회가 시작되었다.
사회안전 및 군사용을 목적으로 KIST가 유진로봇과 협력하여 개발한 로스큐 플랫폼은 이라크에 파병됐던 롭해즈의 신형버전으로 전 버전보다 고속(8km/h)화 소형 경량화(27kg) 되어 험지등판 성능이 크게 향상되었다.
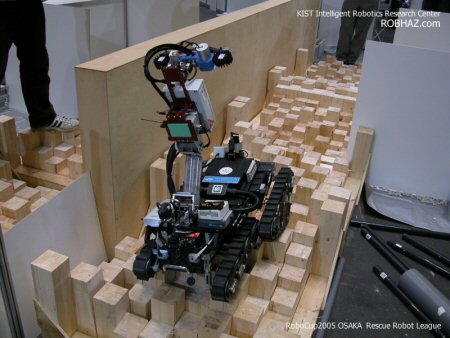
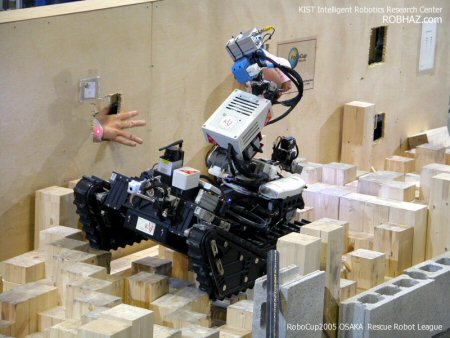
이번에 참가한 구조로봇 “로스큐”(Roscue:robot for rescue)는 재난 현장과 같은 험지 이동기능이 뛰어난 피동형 더블트랙 이동 메커니즘 기능을 갖고 있으며, 레이저 거리 센서를 이용하여 로봇이 재난 현장의 구조를 파악하는 실시간 지도작성 기능이 있고, 열적외선 카메라를 통한 희생자 위치 탐색이 가능하다. 뿐만 아니라 접이식 구조의 팔, 4대의 카메라, 자세센서, 온도센서, CO2 센서를 활용한 현장 상황 센싱 및 희생자 신체상태 센싱 기능이 포함돼 있다.
로스큐는 2004 Robocup US Open-RescueRobot에서 우승을 거둔바 있으며, 이라크 자이툰 부대에서 시험활용과 국내 최초 필드서비스 로봇 수출, 과기부 신기술 인정 KT마크 획득 등의 실적을 거둔 바 있다. ⓢ
■ 로보컵 홈페이지 : www.robocup.org
[사진 = 로스큐의 구조로봇 험지주행 부문 희생자 위치 탐색 경기 장면(출처 : KIST)]